你覺得中國人有創造力嗎?
你見過中國學生考試作弊嗎?
這是中國的全國高考,又名高考。
中國對高考是認真的!你覺得中國人有創造力嗎? 嚴重到考點周邊的街道都有警衛,考點期間造成噪音的路人將被罰款!

攝像頭模組,全稱CameraCompact Module,簡寫為CCM。CCM 包含四大件: 鏡頭(lens)、傳感器(sensor)、軟板(FPC)、圖像處理芯片(DSP)。決定一個攝像頭好壞的重要部件是:鏡頭(lens)、圖像處理芯片(DSP)、傳感器(sensor)。CCM的關鍵技術為:光學設計技術、非球面鏡製作技術、光學鍍膜技術。
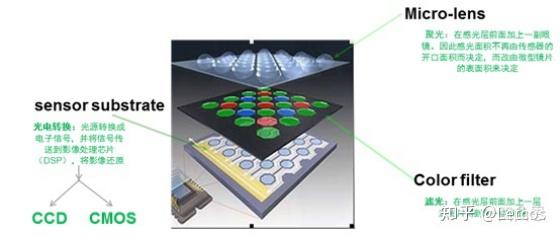
工作原理:物體通過鏡頭(lens)聚集的光,通過CMOS或CCD集成電路,把光信號轉換成電信號,再經過內部圖像處理器(ISP)轉換成數字圖像信號輸出到數字信號處理器(DSP)加工處理,轉換成標準的GRB、YUV等格式圖像信號。
Lens是一個能夠接收光信號並彙聚光信號於感光器件CMOS/CCD的裝置。Lens決定sensor的採光率,其整體效果相對於一個凸透鏡。
一般camera的鏡頭結構是由幾片透鏡組成,分有塑膠透鏡(PLASTIC)和玻璃透鏡(GLASS),通常CAMERA用的鏡頭結構有:1P,2P,1G1P,1G3P,2G2P,4G,8P等。透鏡越多,成本越高;玻璃透鏡比塑膠透鏡貴,但是玻璃透鏡的成像效果比塑膠透鏡的成像效果要好。目前市場上針對mobile phone配置的camera以1G3P(1片玻璃透鏡和3片塑膠透鏡組成)為主,目的是降低成本。
A、消除盡可能多Flare
B、畫質清晰度
C、CRA(Chief Ray Angle主光線角度)要match,減少shading(Lens cra < Sensor CRA, 相差最好在2度以內)
D、光圈盡可能的大
E、Distortion 盡可能的輕微等
(1)焦距:鏡頭焦距的長短決定著拍攝的成像大小,視場角大小,景深大小和畫面的透視強弱。一般來說對於單片鏡頭就是鏡頭中心到焦點的距離,而相機鏡頭是由多片透鏡組合,就要復雜許多。這裡焦距就指的是從鏡頭的中心點到感光元器件(CCD)上所形成的清晰影像之間的距離。
(2)視場角:我們常用水平視場角來反映畫面的拍攝範圍。焦距f越大,視場角越小,在感光元件上形成的畫面範圍越小;反之,焦距f越小,視場角越大,在感光元件上形成的畫面範圍越大。
(3)F值(口徑比):F 值即指鏡頭之明亮度(即鏡頭的透光量)。F=鏡頭焦距/光圈直徑。F值相同,長焦距鏡頭的口徑要比短焦距鏡頭口徑大。
(4)光圈:光圈是位於鏡頭內部的、可以調節的光學機械性闌孔,可用來控制通過鏡頭的光線的多少。可變光圈(Iris diaphragm)。鏡頭內部用來控制闌孔大小的機械裝置。或指用來打開或關閉鏡頭闌孔,從而調節鏡頭的f-stop的裝置。
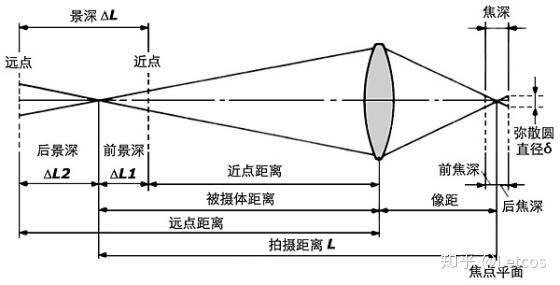
(5)景深:當某一物體聚焦清晰時,從該物體前面的某一段距離到其後面的某一段距離內的所有景物也都相當於是清晰的。焦點相當清晰的這段從前到後的距離就叫做景深。
全稱Voice Coil Montor,電子學裡面的音圈電機,是馬達的一種。因為原理和揚聲器類似,所以叫音圈電機,具有高頻響、高精度的特點。其主要原理是在一個永久磁場內,通過改變馬達內線圈的直流電流大小,來控制彈簧片的拉伸位置,從而帶動上下運動。手機攝像頭廣泛的使用VCM實現自動對焦功能,通過VCM可以調節鏡頭的位置,呈現清晰的圖像。
VCM的性能主要是看電流和行程距離的比值。從啟動電流開始,電流上升要和所能驅動的行程距離成比例,所需要上升電流越小,精度越高,同時還看最大耗電量,最大功率,尺寸大小。
從結構上大致可分三類: (1)彈片式結構;(2)滾珠式結構; (3)摩擦式結構。
從功能上大致分為五類: (1)Open loop開馬達; (2)Close loop閉環馬達;(3)Alternate中置馬達;(4)OIS光學防抖馬達(分平移式、移軸式、記憶金屬式等);(5) OIS+Close loop六軸馬達。
進入自動調焦模式後,Driver從0到最大值,使得鏡頭從原地移動到最大位移處,此時sensor成像面自動拍攝圖片並保存到DSP內,DSP通過這些圖片,計算每一副圖片的MTF(Modulation transfer function)值,從而在這條MTF曲線中找到最大值,並通過算法,得到這個點對應的電流大小,再一次指示Driver提供給音圈這個電流,而使鏡頭穩定在這個成像面,使得達到自動變焦。

A:實現光學變焦採用變焦馬達(ZOOM)
通過移動鏡頭內部的鏡片來改變焦點的位置,改變鏡頭焦距的長短,並改變鏡頭的視角大小,從而實現影響的放大與縮小。
B:實現自動對焦採用對焦馬達(AF)
過微距離移動整個鏡頭(而不是鏡頭內的鏡片)的位置,控製鏡頭焦距的長短,而實現影像的清晰.手機中常用的方法。
光學對焦和光學變焦是不同的概念:
光學變焦是通過移動鏡頭內部鏡片的相對位置來改變焦點的位置,改變鏡頭焦距的長短,並改變鏡頭的視角大小,從而實現影像的放大與縮小;
光學對焦是實際上是調整整個鏡頭的位置(而不是鏡頭內的鏡片)的位置,來控制像距,從而使成像最清晰。
自然界存在著各種波長的光線,人眼識別光線的波長范圍在320nm-760nm之間, 超過320nm-760nm的光線人眼就無法見到;而攝像機的成像元器件CCD或CMOS可以看到絕大部分波長的光線。由於各種光線的參與,攝像機所還原出的顏色與肉眼所見在色彩上存在偏差。如綠色植物變得灰白,紅色圖畫變成淺紅色,黑色變成紫色等。在夜間由於雙峰濾光片的過濾作用,使CCD不能充分利用所有光線,不產生雪花噪點現象及其低照性能難以令人滿意。為了解決這個問題,就使用IR-CUT雙濾鏡。
IR-CUT雙濾鏡是指在攝像頭鏡頭組里內置了一組濾鏡,當鏡頭外的紅外感應點偵測到光線的強弱變化後,內置的IR-CUT自動切換濾鏡能夠根據外部光線的強弱隨之自動切換,使圖像達到最佳效果。也就是說,在白天或黑夜下,雙濾光片能夠自動切換濾鏡,因此不論是在白天還是黑夜下,都能得到最佳成像效果。
IR CUT雙濾光片切換器由一個紅外截止低通濾光片(一片紅外截止或吸收濾光片)、一個全光譜光學玻璃(一片全透光譜濾光片)、動力機構(可以是電磁、電機或其他動力源)以及外殼組成,它通過一塊電路控制板來進行切換、定位。當白天的光線充分時,電路控制板驅使切換器切換並定位到紅外截止濾光片工作,CCD或CMOS還原出真實色彩;當夜間可見光不足時,紅外截止濾光片自動移開,全光譜光學玻璃開始工作,這時,它能感應紅外燈的紅外光,使CCD或CMOS充分利用到所有光線,從而大大提高了紅外攝像機的夜視性能,整個畫面也就清晰自然了。
a、濾光片的紅外線截止程度,透光率,和光整形效果等。
b、動力驅動部分
c、控制電路
4、濾光片:一般用鍍膜(IR Coating)的方法或藍玻璃來濾除紅外光。
Image sensor(圖像傳感器)是一種半導體芯片,其表面有幾百萬到幾千萬個光電二極管,光電二極管受到光照就會產生電荷,將光線轉換成電信號。其功能類似於人的眼睛,因此sensor性能的好壞將直接影響到camera的性能。
感光原件:CCD、CMOS(PPS和APS)
不同工藝:前照式FSI、背照式BSI、堆棧式
1.像素
傳感器上有許多感光單元,它們可以將光線轉換成電荷,從而形成對應於景物的電子圖像。而在傳感器中,每一個感光單元對應一個像素(Pixels),像素越多,代表著它能夠感測到更多的物體細節,從而圖像就越清晰,像素越高,意味著成像效果越清晰。攝像機分辨率的乘積就是像素值,例如:1280×960=1228800
2.靶面尺寸
圖像傳感器感光部分的大小,一般用英寸來表示。和電視機一樣,通常這個數據指的是這個圖像傳感器的對角線長度,如常見的有1/3英寸,靶面越大,意味著通光量越好,而靶面越小則比較容易獲得更大的景深。
3.感光度
即是通過CCD或CMOS以及相關的電子線路感應入射光線的強弱。感光度越高,感光面對光的敏感度就越強,快門速度就越高,這在拍攝運動車輛,夜間監控的時候尤其顯得重要。
4.電子快門
是比照照相機的機械快門功能提出的一個術語。其控製圖像傳感器的感光時間,由於圖像傳感器的感光值就是信號電荷的積累,感光越長,信號電荷積累時間也越長,輸出信號電流的幅值也越大。電子快門越快,感光度越低,適合在強光下拍攝。
5.幀率
既指單位時間所記錄或者播放的圖片的數量。連續播放一系列圖片就會產生動畫效果,根據人類的視覺系統,當圖片的播放速度大於15幅/秒(即15幀)的時候, 人眼就基本看不出來圖片的跳躍;在達到24幅/s——30幅/s(即24幀到30幀)之間時就已經基本覺察不到閃爍現象了。
每秒的幀數(fps)或者說幀率表示圖形傳感器在處理場時每秒鐘能夠更新的次數。高的幀率可以得到更流暢、更逼真的視覺體驗。
6.信噪比
是信號電壓對於噪聲電壓的比值,信噪比的單位用dB來表示。一般攝像機給出的信噪比值均是AGC(自動增益控制)關閉時的值,因為當AGC接通時,會對小信號進行提升,使得噪聲電平也相應提高。
信噪比的典型值為45——55dB,若為50dB,則圖像有少量噪聲,但圖像質量良好;若為60dB,則圖像質量優良,不出現噪聲,信噪比越大說明對噪聲的控制越好。這個參數關係的圖像中噪點的數量,信噪比越高,給人感覺畫面越乾淨,夜視的畫面中點狀的噪點就越少。
數字信號處理器DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通過一系列複雜的數學算法運算,對數字圖像信號參數進行優化處理,並把處理後的信號通過USB等接口傳到PC等設備
名詞解釋:
ISP 是Image Signal Processor 的簡稱,也就是圖像信號處理器。
DSP是Digital Signal Processor 的縮寫,也就是數字信號處理器。
功能解釋:
ISP一般用來處理Image Sensor(圖像傳感器)的輸出數據,如做AEC(自動曝光控制)、AGC(自動增益控制)、AWB(自動白平衡)、色彩校正、Lens Shading、Gamma 校正、祛除壞點、Auto Black Level、Auto White Level 等等功能的處理。
DSP功能就比較多了,它可以做些拍照以及回顯(JPEG的編解碼)、錄像以及回放(Video 的編解碼)、H.264的編解碼、還有很多其他方面的處理,總之是處理數字信號了。
drivers/media/usb/uvc, 只要打開了這套驅動,幾乎所有的UVC 攝像頭都可以直接使用。





當莫妮卡開著她的電動車前往母親家時,車上的電池指示器顯示需要重新充電。她在一個充電站停下來,在加油站刷了信用卡,把噴嘴插入車內,並在5分鐘內將400升用過的奈米液體換成新的。在她等待的過程中,一輛油罐車開過來為充電站補充燃料,交換數萬升充滿電的燃料。莫妮卡關上她的電動車的加油...